





Sensor fusion

وصف لـSensor fusion
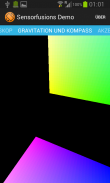
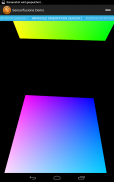
يوضح هذا التطبيق أداء أجهزة الاستشعار المختلفة ودمج أجهزة الاستشعار.
يتم الجمع بين القياسات من الجيروسكوب ومقياس التسارع والبوصلة بطرق مختلفة ويتم تصور النتيجة على شكل بوصلة ثلاثية الأبعاد يمكن تدويرها عن طريق تدوير الجهاز.
الحداثة الكبيرة في هذا التطبيق هي دمج اثنين من المستشعرات الافتراضية: "Stable Sensor Fusion 1" و"Stable Sensor Fusion 2" يستخدمان Android Rotation Vector مع مستشعر الجيروسكوب المعاير ويحققان دقة واستجابة غير مسبوقة.
بالإضافة إلى هذين المستشعرين المدمجين، هناك مستشعرات أخرى للمقارنة:
- دمج مستشعر مستقر 1 (دمج مستشعر AndroidRotation Vector والجيروسكوب المُعاير - أقل استقرارًا، ولكنه أكثر دقة)
- Stable Sensor Fusion 2 (دمج مستشعر Android Rotation Vector والجيروسكوب المُعاير - أكثر استقرارًا، ولكن أقل دقة)
- Android Rotation Vector (دمج فلتر كالمان لمقياس التسارع + الجيروسكوب + البوصلة) - أفضل اندماج متاح حتى الآن!
- جيروسكوب معاير (نتيجة أخرى لدمج مرشح كالمان لمقياس التسارع + الجيروسكوب + البوصلة). يوفر دورانًا نسبيًا فقط، وبالتالي قد يختلف عن أجهزة الاستشعار الأخرى.
- الجاذبية + البوصلة
- مقياس التسارع + البوصلة
كود المصدر متاح للجمهور. يمكن العثور على الرابط في قسم "حول" في التطبيق.
Sensor fusion - إصدار 2.0.117
(23-06-2024)
Sensor fusion - معلومات APK
نُسخة APK: 2.0.117الحزمة: org.hitlabnz.sensor_fusion_demoآخر إصدار من Sensor fusion
نُسخ أخرى





 3.4
3.4
 4.49
4.49




تطبيقات من الفئة نفسها









